

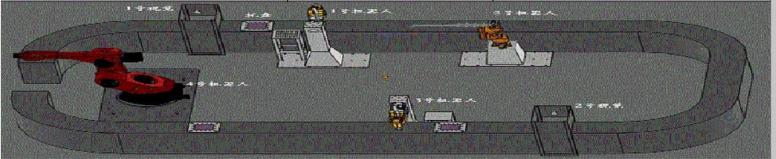
机器人模拟生产线
发布时间:2017-08-04
系统概述
本项目是采用相机采集产品位置数据,由PLC发送给机器人,从而实现产品的精确装配,本项目是进行无线鼠标的安装等。
系统原理
主要是通过以太网将相机传输定位数据给PLC,PLC传输数据给4台机器人,机器人依据坐标数据进行产品的装配,产品的传输是通过MODBUS控制两台伺服电机
系统配置
- 自动化控制器: e-Control PLC,是控制系统的核心硬件平台。
- 人机界面硬件: TPC1203工业级12寸触摸式平板电脑,稳定可靠。无线平板客户可以实现远程无线操作现场设备。
- 人机界面软件: NETSCADA组态软件开发平台,提供压片机需要的相关功能模块。

系统评价:
- 本系统采用CCD进行鼠标的位置精确采集,由PLC发送控制命令,实现0.5MM的精度控制。
- PLC及平板电脑标配以太网接口,单机响应速度快,且具有高扩展性。
- 基于NETSADA组态软件可以实现产品的追溯记录,和到期维修提示。




